انواع دسته موتور ها

مقدمه ای بر دسته موتور ها
تولید خودروهای سبک تر به منظور کاهش مصرف سوخت معمولا با مسئله ی صدا و ارتعاش خودرو در تناقض است. چرا که با کاهش وزن بدنه ی خودرو، نسبت وزن موتور به بدنه افزایش می یابد. و در نتیجه سطح ارتعاشات و صدای تولید شده زیاد می شود.
ارتعاشات و صدای ناشی از موتور به بدنه ی خودرو منتقل می شود. و سپس از طریق کابین، به گوش مسافران می رسد. بنابراین خودروسازان همواره به دنبال این مسئله هستند که ارتعاشات انتقالی از موتور را با به کار گیری دسته موتورها به حداقل برسانند.

محدوده فرکانسی و دامنه ی تحریک های وارد به خودرو
یک سیستم دسته موتور مناسب باید برای تحریک های با فرکانس پایین و دامنه ی بالا، سختی و میرایی زیاد فراهم کند. این تحریک ها دارای دامنه ی بزرگتر از 0.3 میلی متر و فرکانس بین 1 تا 50 هرتز می باشند. که از حالت دور درجای موتور، سطح ناهموار جاده و شتاب خودرو ناشی می شوند.
از طرفی دیگر، سیستم دسته موتور برای ارتعاشات با فرکانس بالا (50 تا 300 هرتز) و دامنه ی پایین (کوچکتر از 0.3 میلی متر)، باید سختی و میرایی پایین فراهم کند. که این ارتعاشات از تحریک های درونی موتور در سرعت های بالا ناشی می شوند.
بنابراین، سختی و میرایی سیستم باید تابعی از فرکانس تحریک باشد. خودروسازان همواره به دنبال این مسئله هستند تا بتوانند دسته موتورهایی با این خاصیت تولید کنند. این امر موجب تولید انواع انواع مختلف دسته موتورها با ویژگی های متفاوت شده است که در ادامه به شرح آن ها پرداخته می شود.
انواع دسته موتور ها
دسته موتورها بر اساس نوع طراحی به سه دسته کلی تقسیم بندی می شوند:
- الاستومری
- هیدرولیکی
- کنترلی
این طراحی ها در طی بیش از 100 سال امروزه به صورت استاندارد درآمده است. در حقیقت کاری که سازندگان و طراحان خودرو انجام می دهند انتخاب پارامترهای مناسب برای این دسته موتورها اعم از مشخصات فیزیکی و محل نصب می باشد. در ادامه به بررسی انواع دسته موتورها پرداخته می شود.
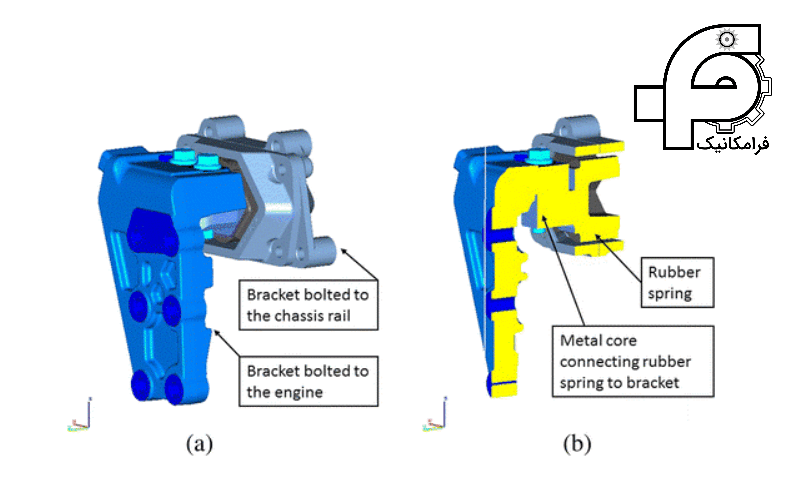
دسته موتور های الاستومری
دسته موتورهای الاستومری یا لاستیکی حدودا از سال 1930 مورد توجه قرار گرفته است. در شکل زیر یک نمونه از این دسته موتورها نشان داده شده است. این نوع دسته موتورها ارزان قیمت و کوچک هستن و نیازی به تعمیرات و نگهداری ندارند.
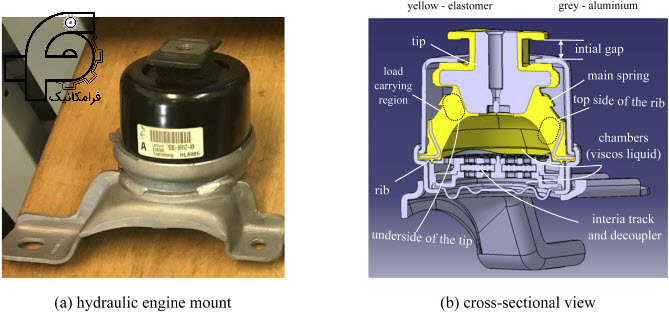
دسته موتورهای هیدرولیکی
محدودیتهای دستهموتورهای الاستومری انگیزهی تولید دستهموتورهای هیدرولیکی را فراهم کرد. گزارش شده است که استفاده از دستهموتورهای هیدرولیکی شرایط راحتی راننده و مسافران را بهبود بخشیده و صدای منتقل شده به داخل خودرو را کاهش داده است.
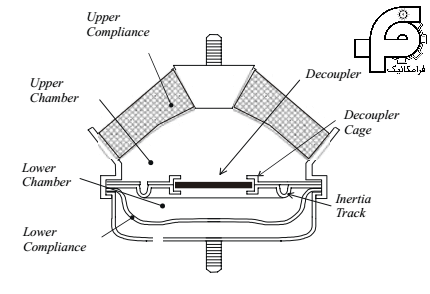
- دسته موتور هیدرولیکی با اریفیس ساده
- دسته موتور هیدرولیکی با شیار اینرسی
- دسته موتور هیدرولیکی با شیار اینرسی و دیکوپلر
دسته موتور های کنترلی
در کنترل فعال ارتعاشات، به وسیلهی یک یا چند عملگر مکانیکی، یک نیروی متقابل ایجاد میشود. تا انتقال نیروهای مزاحم را از بین ببرد. یک سیستم دستهموتور فعال معمولاً از یک دسته موتور غیرفعال (الاستومری یا هیدرولیکی)، یک عملگر مکانیکی، یک سنسور برای اندازهگیری ارتعاشات سازهای و یک کنترلر الکترونیکی تشکیل میشود. دستهموتورهای غیرفعال در زمانهایی که عملگر مکانیکی به درستی عمل نمیکند استفاده میشود.







دیدگاهتان را بنویسید