بالانس استاتیکی و دینامیکی
همه چیز در مورد بالانس استاتیکی و دینامیکی
بالانس استاتیکی و دینامیکی در واقع دو حالت از یک سیستم فیزیکی هستند. این مفاهیم به خصوص در علم مکانیک و شیمی فیزیک، بسیار قابل بحث بوده و مورد مطالعه قرار میگیرند.
موازنه نیروها در صنعت ماشین آلات بسیار مهم است. عدم تعادل نیروها توسط نیروهای اینرسی مرتبط با جرم متحرک در ماشین های دوار یا رفت و برگشتی ایجاد میشود. تعادل یک جسم دوار برای مقابله با نیروهای اضافی در جهتی غیر از محور چرخش انجام میشود که به جلوگیری از ارتعاشات در بدن کمک میکند.

یک جسم چرخان نامتعادل قادر به چرخش کارآمد نخواهد بود و احتمالاً میلرزد. نیروهای ارتعاشی خارج از محور باعث ایجاد سر و صدا، ناراحتی برای اپراتورهای ماشین میشود و ممکن است از محدودیت های طراحی اجزای دستگاه تجاوز کند و طول عمر این قطعات را کاهش دهد. نابالانسی میتواند کل سیستم را در معرض خطر خرابی فاجعه باری قرار دهد، به ویژه در جاهایی که سرعت چرخش یا جرمِ در حال چرخش، بسیار زیاد است.
بالانس، کارایی هر ماشینی را که به عملکرد روتور بستگی دارد، بهبود میبخشد. همچنین طول عمر ماشین آلات شما را افزایش میدهد، خطر خرابی فاجعه بار اجزای ماشین را کاهش میدهد و از تکنسین در برابر آسیب های احتمالی محافظت میکند.
دو نوع بالانس استاتیکی و دینامیکی وجود دارد، بالانس استاتیکی ، بالانس دینامیکی این دو نوع بالانس تفاوت های عمده ای با هم دارند که در این مقاله با هم بررسی میکنیم.
بالانس استاتيكي چیست؟
کلمه بالانس استاتيكي اصطلاحی است که در فیزیک برای توصیف وضعیتی استفاده میشود که در آن مجموع نیروهای وارد بر جسم در حال سکون، صفر میشود. به عبارت دیگر، نیروهایی که جسم را در جهات مختلف میکشند، متعادل میشوند و باعث میشوند جسم بی حرکت بماند. برای اینکه جسمی در تعادل ایستا باشد، باید در تعادل انتقالی و چرخشی نیز باشد، یعنی نیروهای خارجی و گشتاورهای خارجی وارد بر جسم باید دقیقاً به صفر برسند.
در فیزیک، نیروهای حرکتی اغلب به عنوان بردار توصیف میشوند. بردار یک مفهوم ریاضی انتزاعی است که برای نشان دادن جهت و بزرگی یک نیرو استفاده میشود.
قانون اول حرکت نیوتن بیان میکند که وقتی مجموع نیروهای برداری روی یک جسم صفر شود، جسم با سرعت ثابت باقی میماند. اجسام در حال سکون در حالت سکون باقی میمانند مگر اینکه نیرویی به آنها وارد شود. مجموع نیروهای برداری را نیروی برآیند یا نیروی خالص نیز مینامند.

در حالت بالانس استاتيكي، نیروها بر یک جسم وارد میشوند، اما مجموع بردار تمام نیروهای وارد بر آن جسم صفر است. این بدان معناست که بردارهای مقابل دقیقاً یکدیگر را خنثی میکنند و بنابراین نیروی خالص صفر بر جسم ایجاد میکنند. اگرچه نیروها وجود دارند، جسم بی حرکت میماند.
هنگامی که نیروهای خارجی وارد بر یک جسم یکدیگر را خنثی میکنند، گفته میشود که جسم در تعادل انتقالی است که اولین شرط لازم برای تعادل ایستا میباشد. شرط دوم ثبات چرخشی است. در تعادل دورانی، گشتاور خالص یا نیروی چرخشی وارد بر جسم باید صفر باشد. (کتاب استاتیک مریام)
بالانس استاتيكي زمانی اتفاق میافتد که مرکز ثقل یک جسم روی محور چرخش باشد. این نوع بالانس اجازه میدهد تا جسم ثابت بماند، با محور افقی، بدون اعمال نیروی ترمز. تعادل ایستا به دلیل نیروی گرانش تمایلی به چرخش ندارد.
بالانس دینامیکی چیست؟
رخداد بالانس دینامیکی زمانی است که چرخش، هیچ نیروی گریز از مرکز یا زوجی ایجاد نمیکند. این سیستم بدون نیاز به اعمال هیچ گونه نیروی خارجی، به غیر از نیروی مورد نیاز برای تحمل وزن خود، میچرخد. هنگامی که یک سیستم یا ماشین نامتعادل است، برای جلوگیری از وارد شدن فشار به یاتاقان ها، وزن متعادل کننده اضافه میشود. بالانس دینامیکی راهی برای متعادل کردن ماشینها با چرخش سریع قطعات و سپس اندازهگیری عدم تعادل با استفاده از تجهیزات الکترونیکی است. سپس عدم تعادل محاسبه شده را میتوان از وزن، اضافه یا کم کرد تا زمانی که لرزش قطعات کاهش یابد.
بالانس دینامیکی به زبان ساده روشی است که از طریق آن قطعات متحرک یک ماشین یا قطعه ای از ماشین آلات صنعتی را متعادل میکنیم. برای این کار این قطعات را با سرعت بالا میچرخانیم. وقتی این کار را انجام میدهیم، میتوانیم اندازهگیری عدم تعادل را در هر جزء در حال چرخش به دست آوریم.
چند نمونه از بالانس دینامیکی
مثال های زیادی وجود دارد که چگونه از بالانس دینامیکی برای افزایش عملکرد استفاده میکنیم. کاربردهای متداول برای بالانس دینامیکی ماشین، میل لنگ موتور و لاستیک خودرو است. همچنین خدمات بالانس برای محورهای محرک و فلایویل ها. اینها نمونه هایی از کاربرد بالانس دینامیکی در صنعت خودرو هستند. نمونه های دیگر عبارتند از بالانس دینامیکی پروانه ها، بالانس صنعتی فن، بالانس روتور فلیل و بالانس روتور ماشین. ما میتوانیم به معنای واقعی کلمه تجزیه و تحلیل بالانس دینامیکی را روی هر ماشین و اجزای آن انجام دهیم.
چرا تعادل دینامیکی مهم است؟
هدف اولیه هر تجهیزاتی داشتن عملیاتی است که عاری از لرزش باشد. با این حال، ارتعاش همیشه بخشی از هر ماشینی است که میچرخد، و برخی از سطوح ارتعاش میتوانند قابل قبول باشند. به جای تلاش برای خلاص شدن از شر تمام ارتعاشات در ماشین آلات، لازم است تا حد امکان تعادل ماشین را جستجو کنید. این فرآیند لرزش را به حداقل میرساند تا زمانی که سطح نویز کمتری وجود داشته باشد. علاوه بر این، کاهش لرزش میتواند طول عمر ماشین آلات شما را افزایش دهد. بسیاری از مشتریان جدید ما میگویند که آنها متوجه نشدهاند که خدمات بالانس دینامیکی چقدر در افزایش عملکرد عملیاتی آنها مفید بوده است.
مزایای تعادل دینامیکی چیست؟
بالانس دینامیکی برای صنعت مکانیک و مهندسی معنی زیادی دارد. وقتی دستگاه در حالت تعادل کار میکند، همانطور که باید کار میکند. اگر از یک ماشین صاف و متعادل استفاده کنید، عواقب زیادی ممکن است رخ دهد. به عنوان مثال، نتایج تعادل دینامیکی میتواند منجر به موارد زیر شود:
نویز کمتر: همچنین ممکن است پس از انجام تعادل دینامیکی، نویز کمتری نیز وجود داشته باشد. این به این دلیل است که لرزشی که باعث سر و صدای هوا میشود دیگر وجود نخواهد داشت. علاوه بر این، خستگی اپراتور را که در اثر قرار گرفتن در معرض نویز و لرزش بیش از حد ایجاد میشود نیز برطرف خواهید کرد. این روش در نتیجه به بهبود کارایی اپراتور کمک خواهد کرد.
افزایش ایمنی: ایمنی اپراتور نیز بهبود مییابد زیرا احتمال خرابی ماشین آلات کمتر است.
خرابی کمتر: علاوه بر این، بالانس کردن دستگاه عمر بلبرینگ را افزایش میدهد. همچنین توجه به این نکته مهم است که به دلیل این که ارتعاش به دلیل عدم تعادل ایجاد میشود که توسط سازه مجاور جذب میشود. هنگامی که یک ماشین در تعادل کار میکند، تنش ساختاری را به حداقل میرساند. در نهایت، با توجه به بهره وری؛ افزایش زمان کار، بهره وری را افزایش میدهد.
تفاوت بالانس استاتیکی و دینامیکی
بالانس استاتیکی به توانایی یک جسم ثابت نسبت به تعادل آن اشاره دارد. در حالی که بالانس دینامیکی توانایی یک جسم برای حفظ تعادل در حین حرکت یا هنگام جابجایی بین موقعیت ها است.
برای اینکه هر شکلی از تعادل اتفاق بیفتد، مرکز ثقل باید بر روی پایه نگهدارنده اشیاء قرار گیرد. مرکز ثقل به قسمتی اطلاق میشود که مرکز وزن جسم است. بالانس نقش بسیار مهمی در ماشین ها دارد. تعادل در ماشین ها به اجسام در حال چرخش برای جلوگیری از ارتعاش کمک میکند. لرزش در ماشین ها میتواند منجر به خرابی شود. خرابی معمول در ژنراتورها و ماشین آلات سنگین رخ میدهد، بنابراین انجام بالانس استاتیکی و دینامیکی میتواند به جلوگیری از خرابی ماشین ها کمک کند.
تعادل همچنین میتواند شامل جابجایی مرکز ثقل به سمت مرکز چرخش باشد. تعادل دینامیکی زمانی است که سیستم دوار هیچ نیرو یا زوج دیگری را وارد نمیکند. به غیر از نیروی مورد نیاز، سیستم بدون نیاز به هیچ نیروی خارجی یا فشار اضافی میچرخد.

تعریف بالانس استاتیکی به توانایی یک جسم ثابت در تعادل خود اشاره دارد. به عبارتی بالانس دینامیکی توانایی یک جسم برای تعادل در هنگام حرکت یا هنگام جابجایی بین موقعیت ها است.
متعهد شدن به بالانس استاتیکی و دینامیکی میتواند به افزایش طول عمر، کیفیت و دقت ماشین آلات شما کمک کند. قطعات نامتعادل میتواند منجر به خرابی دستگاه شما یا بدتر از همه خرابی فاجعه بار شود. تعادل دینامیکی تعادلی است که در آن واکنش دهنده ها با سرعت یکسان و ثابت به محصولات و محصولات به واکنش دهنده ها تبدیل میشوند.
تفاوت های اصلی بالانس استاتیکی و دینامیکی
تعادل ایستا تعادلی است که زمانی اتفاق میافتد که تمام ذرات واکنش در حالت سکون باشند و هیچ حرکتی بین واکنش دهنده ها و محصولات وجود نداشته باشد.
به طور کلی:
- تعادل ایستا با جسمی که در حالت سکون متعادل است و تعادل دینامیکی با جسمی که در حال حرکت متعادل است انجام میشود.
- در صورتی که مجموع اوزان حول محور چرخش صفر باشد و تعادل دینامیکی در آنجا ایجاد شود که نیروی گریز از مرکز حاصل و همچنین یک زوج حاصل وجود نداشته باشد، تعادل ایستا ایجاد میشود.
- بالانس استاتیکی در جایی انجام میشود که مرکز ثقل روی محور چرخش بدن باشد در حالی که بالانس دینامیکی در جایی انجام میشود که بدن یا به دلیل یک نیروی خارجی حول محور میچرخد یا با تغییر مرکز ثقل بدن.
- کلا بالانس استاتیکی و دینامیکی میتوانند به افزایش طول عمر، کیفیت و دقت دستگاه شما کمک کنند، در حالی که قطعات نامتعادل و نابالانسی میتوانند منجر به خرابی دستگاه شما شوند.

بالانس استاتیکی و دینامیکی چگونه اتفاق میافتد؟
بالانس استاتیکی و دینامیکی فرآیند پیچیده ای است که برای افزایش گسترش جرم یک جسم به منظور چرخش در یاتاقان های آن بدون اعمال نیروهای گریز از مرکز نامتعادل بر روی آن انجام میشود. هنگامی که دستگاه در تعادل کار میکند، همانطور که باید و به کارآمدترین روش کار میکند. در حالی که اگر دستگاه نامتعادل باشد، خطر خرابی و ناکارآمدی طولانی مدت را به دنبال دارد. فرآیند تعادل استاتیک یا دینامیکی لرزش را به حداقل میرساند و سطح صدای تولیدی دستگاه را کاهش میدهد و همچنین عمر دستگاه را افزایش میدهد.
یکی از مزایای کلیدی بالانس دینامیکی که آن را به تکنیک ترجیحی، به ویژه برای اجزای با کارایی بالا تبدیل میکند، این است که اشیاء را میتوان با دقت بسیار بالا متعادل کرد.
بالانس استاتیکی و دینامیکی چگونه اتفاق می افتد؟
وقتی بخشی از ماشین را به صورت ایستا متعادل میکنیم، مرکز ثقل آن در محور چرخش آن قرار میگیرد. این فرآیند به این معنی است که بدون اعمال نیروی ترمز در محور افقی ثابت میماند. عدم بالانس استاتيكي حتی زمانی که روتور در حال چرخش نیست وجود خواهد داشت.
از یاتاقانهای اصطکاک کم برای تهنشینی قطعه استفاده میشود تا سنگینترین قسمت در پایین باشد. سپس مواد را از قسمت پایین (سمت سنگین) جدا میکنیم. یا از بالا (سمت نور) اضافه کنید تا زمانی که روی یک محور واقعی بچرخد. این کار را تا جایی تکرار میکنیم که نقطه سنگین از بین برود و روتور دیگر بدون کمک نمیچرخد.
بالانس دینامیکی شامل تنظیم تعادل یک جسم با افزودن یا حذف وزن است. ابتدا باید عدم تعادل اجزا را تعیین کنیم. ما این را در حالی که با سرعت از پیش تعیین شده در حال چرخش است محاسبه میکنیم. اطلاعات به دست آمده از این فرآیند بینشی در مورد میزان وزن مورد نیاز برای متعادل کردن مناطقی که خیلی سبک یا خیلی سنگین هستند، میدهد.
کاهش ارتعاش از طریق بالانس دینامیکی همچنین تضمین میکند که دستگاه به خوبی کار میکند و نویز کاهش مییابد. این به طور اجتناب ناپذیری از خرابی زودرس سیستم جلوگیری میکند. یک جزء فقط زمانی در تعادل است که در نتیجه چرخش هیچ نیروی گریز از مرکز یا عدم تعادل زوج ایجاد نکند.

دلایل و موارد آنبالانسی
لرزش همیشه عنصری از هر ماشینی است که میچرخد، و اگرچه برخی از سطوح میتواند قابل قبول باشد، اما هدف اصلی هر تجهیزات دوار این است که با کمترین لرزش ممکن کار کند تا از آسیب جلوگیری کند و در نهایت طول عمر دستگاه را افزایش دهد. بنابراین، به جای تلاش برای از بین بردن تمام ارتعاشات، جستجو برای بالانس استاتیکی و دینامیکی ماشین آلات ضروری است تا ارتعاش را تا جایی که سطح سر و صدا کاهش مییابد به حداقل برسانید.
ایجاد بالانس استاتیکی و دینامیکی در ماشین آلات شما، خواه استاتیک باشد یا دینامیک، کلید حذف مشکلات رایج عملکرد است. این مشکلات اغلب شامل لرزش، صدا و گرما است. حذف این موارد در نتیجه باعث افزایش طول عمر، بهبود دقت و جلوگیری از خرابی زودرس سیستم میشود.
آنبالانسی در نتیجه توزیع ناهموار جرم است که باعث ارتعاش دستگاه میشود. ارتعاش از برهم کنش یک جزء جرمی نامتعادل با شتاب شعاعی ناشی از چرخش ایجاد میشود که با هم نیروی گریز از مرکز ایجاد میکند. از آنجایی که اجزا میچرخند، نیرو نیز میچرخد و سعی میکند روتور را در امتداد خط عمل نیرو حرکت دهد.
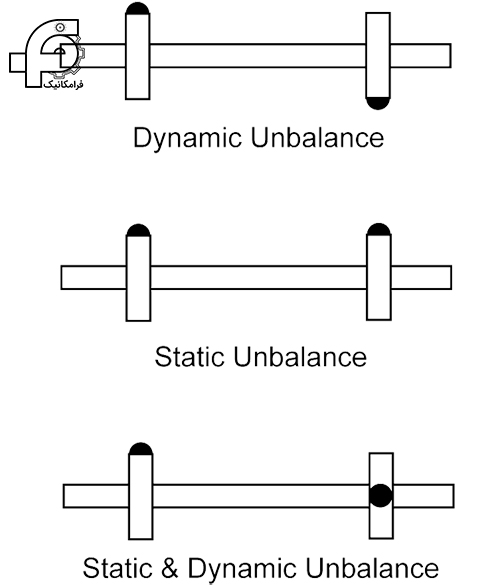
آنبالانسی استاتیک، جایی است که محور جرم فقط به موازات محور شفت جابجا میشود. عدم تعادل فقط در یک صفحه محوری اصلاح میشود.
آنبالانسی زوج، جایی است که محور جرم محور در حال حرکت را قطع میکند.
آنبالانسی دینامیکی، جایی است که محور جرم با محور چرخشی همزمان نیست.
عدم تعادل استاتیکی
عدم بالانس استاتیکی برون محوری مرکز ثقل روتور است که توسط جرم نقطه ای در شعاع معینی از مرکز چرخش ایجاد میشود. جرم مساوی در طرف مقابل (180 درجه) روتور را متعادل میکند.
عدم بالانس استاتیکی به عنوان عدم تعادل تک صفحه طبقه بندی میشود، به این معنی که با یک کمیت بردار منفرد نشان داده میشود و با یک جرم اصلاحی منفرد که در مقابل محل عدم تعادل و در صفحه محوری مرکز جرم روتور اعمال میشود، تصحیح میشود. هنگامی که هیچ راهی برای اضافه کردن (یا حذف) جرم در همان صفحه با عدم تعادل وجود ندارد، اصلاح را میتوان به دو تصحیح مساوی در انتهای روتور تقسیم کرد تا به نتایج یکسانی دست یافت.
عدم تعادل دینامیکی
عدم بالانس دینامیکی ترکیبی از عدم تعادل استاتیک و حرکتی است و رایج ترین نوع عدم تعادل است که در روتورها یافت میشود. برای تصحیح عدم تعادل دینامیکی، لازم است اندازه گیری ارتعاش در حین کار دستگاه انجام شود و جرم های متعادل کننده در دو صفحه اضافه شود.
عدم تعادل دینامیکی از شرایط مشابهی پیروی میکند و تنها زمانی که قطعه در حال چرخش است قابل اندازه گیری است. عدم تعادل دینامیکی زمانی وجود دارد که محور اصلی اینرسی مرکزی نه موازی باشد و نه با محور شفت در مرکز جرم قطع شود. این مورد فقط در دو یا چند صفحه قابل اصلاح است.
عدم تعادل شبه استاتیک
در عدم تعادل شبه استاتیک، ترکیب خاصی از عدم تعادل استاتیک و زوج وجود دارد به طوری که موقعیت زاویه ای یک زوج با موقعیت زاویه ای عدم تعادل استاتیک منطبق است. اگر بتوان از محل محوری نامتعادل برای تصحیح عدم تعادل استفاده کرد، آنگاه یک اصلاح واحد امکان پذیر است. در غیر این صورت، باید مانند عدم تعادل دینامیک رفتار شود. در برخی موقعیتهای تولید، تصحیح را میتوان در یک صفحه منفرد به اندازه کافی نزدیک به منبع عدم تعادل انجام داد تا اصلاح موازنه کارآمد در محدوده تحمل مورد نیاز امکانپذیر شود. این مورد نادر از عدم تعادل دینامیک و استاتیک در شکل نشان داده شده است.
گاهی اوقات زمانی که مواد یا فضای کافی برای انجام تمام اصلاحات عدم تعادل لازم وجود ندارد، تعادل چند صفحه ای مورد نیاز است. در این حالت، یک عملیات پیش متعادل در یک یا دو صفحه کمکی، مقدم بر تعادل نهایی است. در برخی از کاربردها که روتورها انعطاف پذیر هستند، از بالانس چند صفحه ای برای به حداقل رساندن تنش های خمشی داخلی روتور استفاده میشود.
روش های جلوگیری از نابالانسی
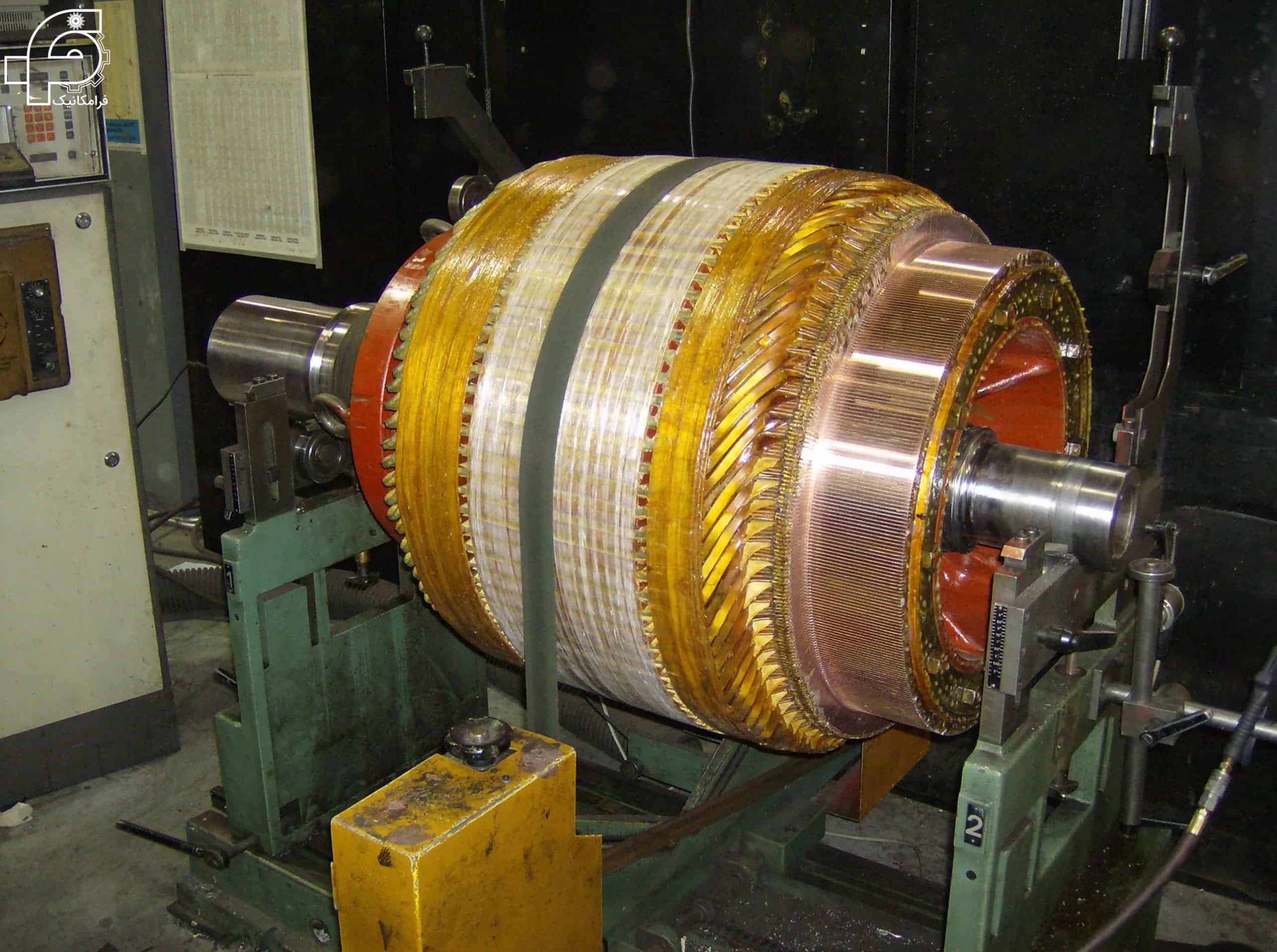
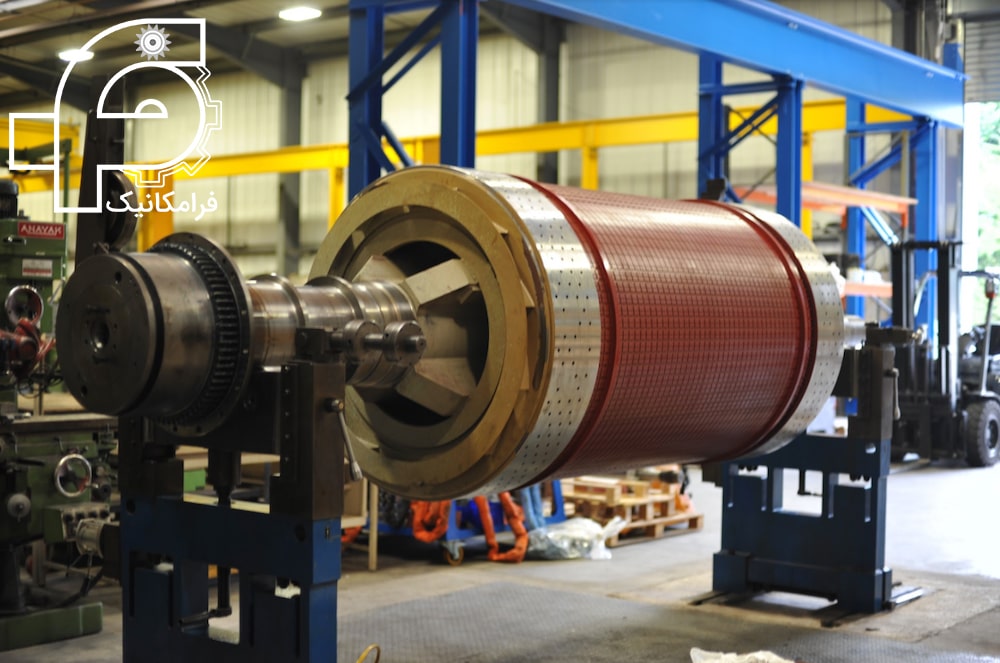
در تعمیر و نگهداری و تعمیرات اساسی تجهیزات دوار، موارد زیادی وجود دارد که انجام تعادل در محل غیرعملی است زیرا نمیتوان اصلاحات وزن را انجام داد. این برای بسیاری از پمپ ها و موتورهای کاملاً بسته و همچنین توربین ها و برخی سانتریفیوژها صادق است. همچنین، فرآیند تعمیر روتور باعث عدم تعادل شدید میشود که نیاز به بالانس قبل از مونتاژ مجدد دارد و در نتیجه آسیب های احتمالی هنگام راه اندازی دستگاه را از بین میبرد. دستگاه بالانس برای متعادل کردن قطعات قبل از نصب مجدد استفاده میشود و از عملکرد روان دستگاه اطمینان حاصل میکند. یک ماشین متعادل کننده میتواند دارایی بسیار ارزشمندی برای هر بخش تعمیر و نگهداری باشد که پمپ ها، موتورها و سایر تجهیزات دوار را تعمیر میکند. با حذف نیاز به ارسال قطعات به متخصصان خارجی برای متعادل شدن، میتواند در هزینه های ناشی از تاخیر صرفه جویی کند.
سازندگان تجهیزات مکانیکی دوار باید این اطمینان را داشته باشند که محصول آنها در هنگام نصب در محل نهایی به خوبی کار میکند. یکی از نگرانی های اصلی، کیفیت متعادل کننده اجزای دوار است. از طریق تجربه، سازنده میتواند حد قابل تحملی از عدم تعادل ایجاد کند که میتواند در یک ماشین خاص پذیرفته شود. تولید کننده میداند که با فراتر رفتن از این حد، شکایات مشتریان و خرابی ماشین آلات در کیفیت محصول او منعکس میشود. برای برآورده شدن این وضعیت، قطعات در زمان سازنده، در بیشتر موارد، قبل از مونتاژ بالانس میشوند و گاهی اوقات بهعنوان مونتاژ بالانس میشوند.
ماشین های بالانس ساز استاتیکی و دینامیکی
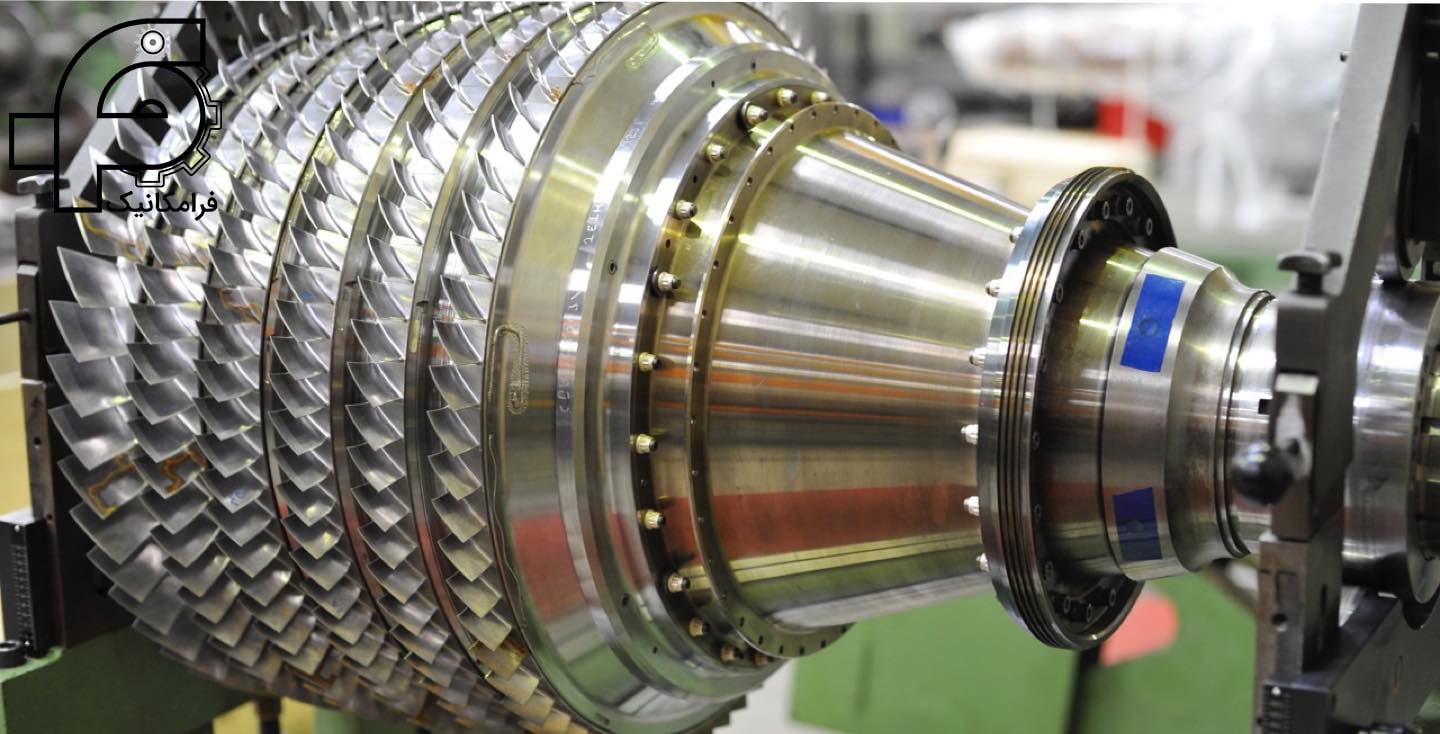
ماشین بالانس ساز ابزار اندازهگیری است که برای بالانس کردن قطعات چرخان ماشین مانند روتور موتورهای الکتریکی ، فن ها ، توربین ها ، ترمزهای دیسکی ، محرک های دیسکی ، پروانه ها و پمپ ها استفاده میشود. واحد مورد آزمایش به پلت فرم پیچ میشود و با تسمه، هوا یا درایو انتهایی میچرخد. همانطور که قسمت چرخانده میشود، ارتعاش در سیستم تعلیق با سنسورها تشخیص داده میشود و از آن اطلاعات برای تعیین میزان عدم بالانس استاتیکی و دینامیکی در قطعه استفاده میشود. همراه با اطلاعات فاز، دستگاه میتواند تعیین کند که چقدر و کجا وزنه اضافه یا حذف کند تا قطعه را متعادل کند.

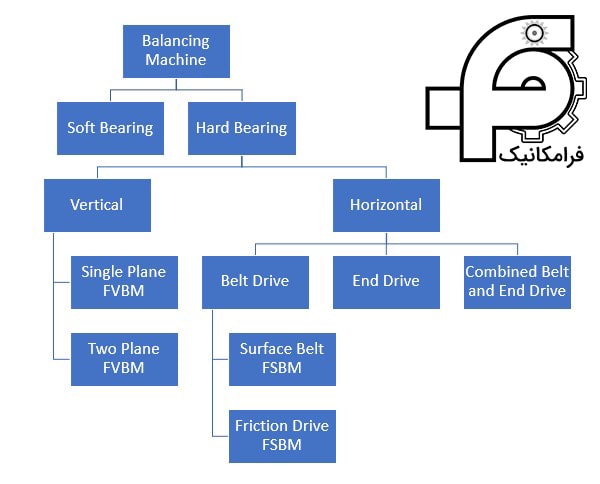
دو نوع اصلی ماشین های بالانس ساز
دو نوع اصلی از ماشین های بالانس وجود دارد، یاتاقان سخت و یاتاقان نرم.
در ماشین های یاتاقان سخت ، بالانس در فرکانس کمتر از فرکانس رزونانس تعلیق انجام میشود. در یک ماشین بلبرینگ نرم، بالانس در فرکانس بالاتر از فرکانس رزونانس تعلیق انجام میشود. هر دو نوع ماشین مزایا و معایب مختلفی دارند. یک ماشین تحمل سخت معمولاً همه کارهتر است و میتواند قطعات با وزنهای بسیار متفاوت را حمل کند، زیرا ماشینهای تحملکننده اثرات گریز از مرکز را اندازهگیری میکنند و فقط به یک بار کالیبراسیون نیاز دارند.
یک ماشین یاتاقان نرم با توجه به مقدار وزن روتور که باید متعادل شود آنقدرها همه کاره نیست. تهیه یک ماشین یاتاقان نرم برای انواع روتورهای جداگانه زمان بر است، زیرا برای انواع قطعات مختلف باید کالیبره شود.
ماشینهای تحمل سخت قویتر و قابل اعتمادتر هستند. هر دو ماشین را میتوان در یک خط تولید ادغام کرد و توسط یک بازوی روباتی یا دروازه ای بارگیری کرد که به کنترل بسیار کمی از سوی انسان نیاز دارد.
ماشین های تعادل ساز استاتیکی:
ماشین های بالانس ساز استاتیکی با ماشین های تحمل سخت و نرم تفاوت دارند زیرا قطعه برای اندازه گیری چرخانده نمیشود. این قطعه به جای تکیه بر یاتاقان های خود، به صورت عمودی بر روی مرکز هندسی خود قرار میگیرد.
بررسی بالانس روتور
هدف بالانس روتور کاهش عدم تعادل به اندازه ای است که پس از نصب در محل به درستی عمل کند. کاهش عدم تعادل باعث کاهش ارتعاش و افزایش کارایی و عمر روتور و یاتاقان ها میشود. علاوه بر این، در طول تولید و تعمیر، لازم است روتورها را قبل از مونتاژ کامل بالانس کنید، زیرا ممکن است دسترسی محدود به روتور وجود داشته باشد.
برای تعیین محل و مقدار جرم های نامتعادل روی روتور از ماشین متعادل کننده استفاده میشود. روتور بر روی بلبرینگ های دستگاه نصب میشود و دستگاه روتور را میچرخاند. ماشین های یاتاقان نرم جابجایی انتهای روتور و یاتاقان ها را اندازه گیری میکنند. ماشین این جابجایی و زاویه فاز را اندازه گیری میکند، سپس عدم تعادل موجود را محاسبه میکند. سپس دستگاههای متعادل کننده IRD اصلاحاتی را در اختیار اپراتور قرار میدهند تا از طریق جمع یا تفریق وزن، روی روتور انجام شود.

هنگام ارزیابی روتور، عدم تعادل را نمیتوان به صورت بصری شناسایی کرد. سوراخ یا وزن اضافه روی روتور ممکن است به دلیل بالانس اولیه روتور باشد، نه علت عدم تعادل. تنها راه ارزیابی عدم تعادل از طریق ارتعاش یا نیرویی است که ایجاد میکند.
ماشين بالانس Balancing machine

ماشينهاي بالانس ديناميكي
بالانس، يك فرآيند جهت بهبود توزيع وزن قطعهاي كه در ياتاقانهايش ميچرخد، ميباشد (بدون نيروهاي گريز از مركز نامتعادل).
بالانس روتورها به دلايل زير ضروري ميباشد:
- كم كردن ارتعاشات و صدا كه به طور كلي سبب بهبود عمر ماشين و كاهش خستگي اپراتور ميشود.
- كاهش خستگي و تنش ديناميكي كه منجر به كاهش ابعاد فونداسيون و تجهيزات ضروري ماشين ميشود.
- براي كاهش افت هاي قدرت كه سيستم مرتعش انرژي را با توجه به فاكتور ميرايي حاضر در سيستم جذب ميكند.
- براي جلوگيري از عملكرد ناصحيح و غلط ماشين هاي مجاور، با توجه به انتقال ارتعاشات ميباشد.
ماشين هاي بالانس وسيلهاي براي اندازهگيري ميزان عدم تعادل در يك روتور ميباشند. در يك ماشين بالانس ديناميكي معمول، روتور بر روي دو سري از ياتاقانها كه توسط يك كوپلينگ به يك درايور مناسب وصل ميشود قرار ميگيرد. نيروهاي گريز از مركز نامتعادل بر روي ياتاقان ها توسط سنسورها اندازهگيري شده و به وسيله اندازهگيري اين تجهيزات، به عدم تعادل روتور مربوط ميشوند. اين عدم تعادل ميتواند توسط خود ماشين به وسيله يك واحد تصحيح مناسب، يا خارج از سيستم بالانس تصحيح شود.
طبقهبندي ماشين هاي بالانس استاتیکی و دینامیکی
ميزان عدم تعادل ميتواند از دو طريق موثر قرار گيرد. قوانين ياتاقان نرم و ياتاقان سخت
ماشين هاي ياتاقان نرم
اين ماشين ها بر اساس قوانين اندازهگيري جابهجايي پايه ريزي شدهاند. روتور بر روي قطعات ارتعاشي سوار شده كه به صورت انعطاف پذير معلق ميباشد. اين سيستم تعليق نرم، به روتور اجازه ميدهد تا زماني كه جابهجاييهاي نوساني چرخشي با توجه به ارتعاشات توسط يك الكتروديناميك (سنسور) ضبط شده و به پانل اندازهگيري ارسال شود، ارتعاش كند.
دامنه ارتعاشات به جرم روتور، سرعت، ياتاقان، جرم معلق و فاصله بين ياتاقان ها بستگي دارد. از اين رو رابطه بين جابه جايي و عدم تعادل موجود، توسط اين پارامترها تغيير ميكند. بنابراين اگر ماشين بخواهد به صورت مستقيم عمل كند، كاليبراسيون ماشين پيش از انجام بالانس هر نوع روتور، ضروري به نظر ميرسد. در اين ماشين ها اثر جانبي (Cross effect) (اثر عدم تعدل موجود در يك صفحه يا صفحه ديگر) بايد حذف شود. اين موضوع را جدايي صفحه (Plane separation) نيز مينامند.
ماشين هاي ياتاقان سخت
اين ماشين ها بر اساس قانون اندازهگيري نيرو عمل ميكنند. وقتي روتور بر روي ياتاقانهاي صلب شروع به چرخش ميكند، به دليل وجود عدم تعادل در روتور، نيروهاي گريز از مركز توليد ميشوند. اين نيروها به وسيله ترانسديوسرهاي حساس فشار كه بر روي پايههاي تعادلي قرار دارند اندازهگيري ميشوند. اين سيگنالها به يك پانل كنترلي جهت اندازهگيري ميزان و محل عدم تعادل، ارسال ميشوند. براي يك سرعت داده شده، نيروهاي عدم تعادل به طور مستقل از وزن روتور، با مقدار عدم تعادل متناسب ميباشند. از اين رو، پيش كاليبراسيون پانل اندازهگيري قبل از نصب، ضروري ميباشد. اين نوع از ماشينها خود به چند دسته ديگر تقسيم ميشوند كه در زير به يك دسته از آنها ميپردازيم:
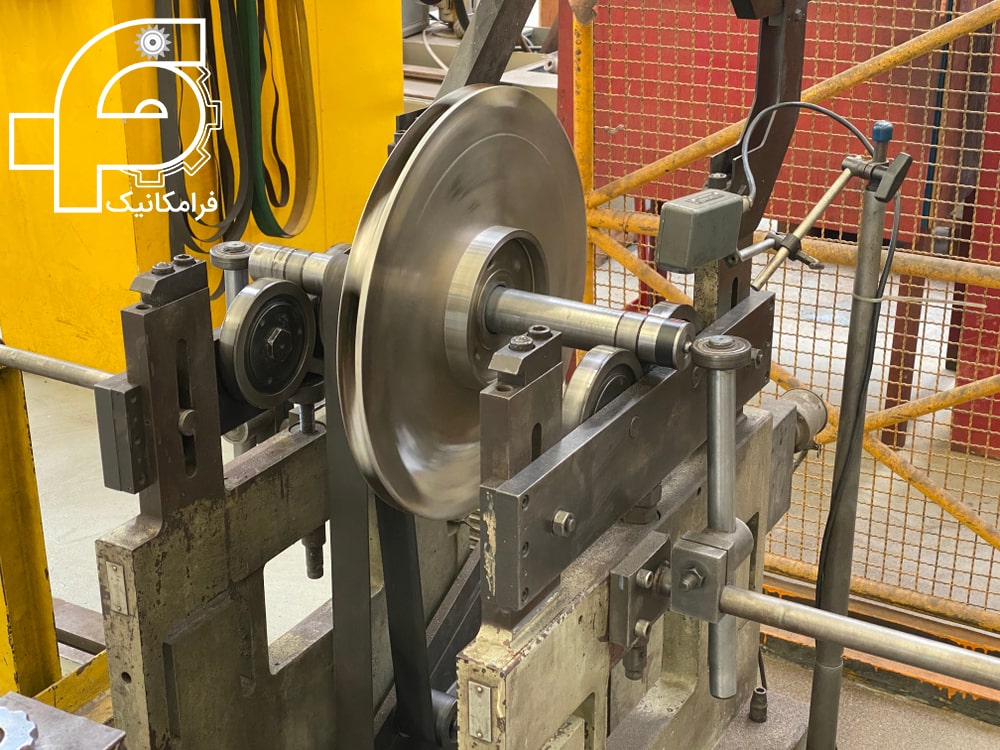
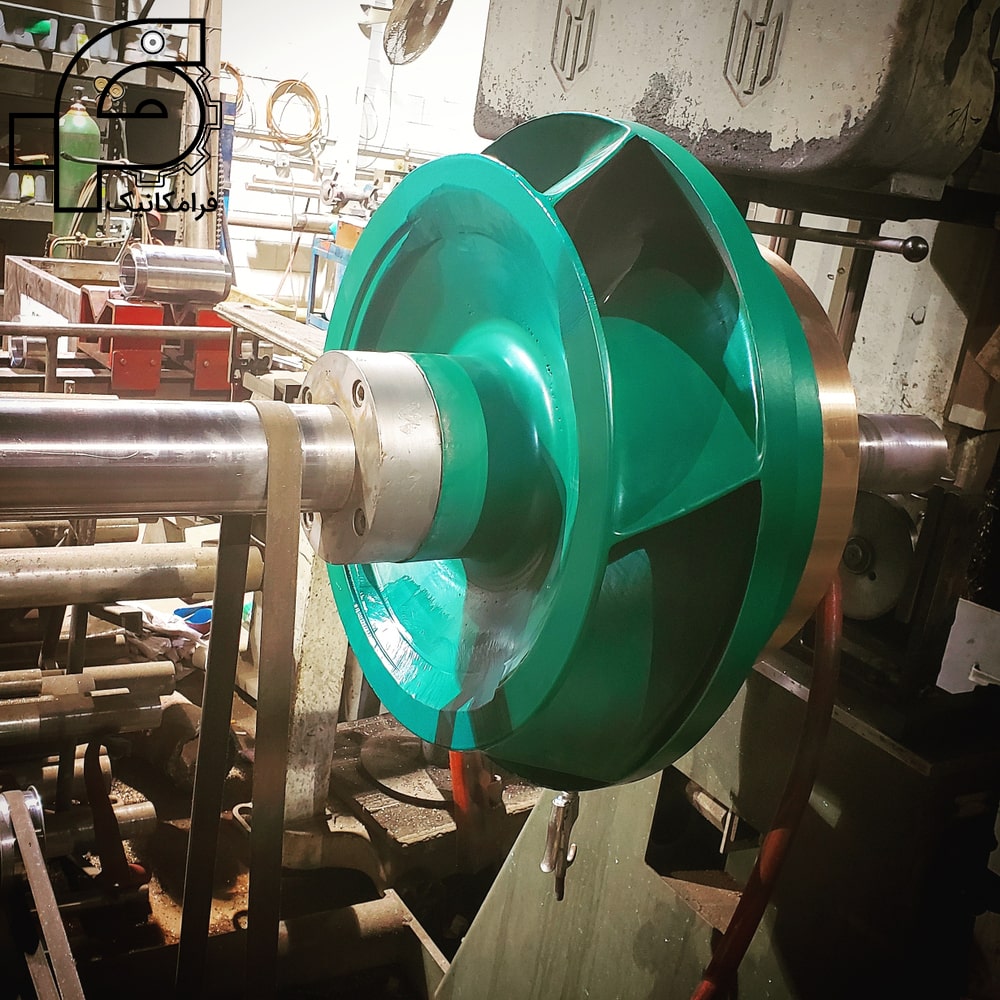
ماشين هاي بالانس افقي
اين ماشينها معمولا براي دو صفحه عمودي (بالانس ديناميكي) مورد استفاده قرار ميگيرند. بالانس تك صفحه (استاتيكي) نيز در اين ماشين ها امكان پذير ميباشد. روتور و محور چرخش آن در يك صفحه افقي ميچرخد. روتورها با سوراخهاي موجود بر محور چرخش خود به كمك يك مندريل مناسب متعادل ميشوند. اين ماشينها شامل قطعات زير ميشوند:
- زمينه ماشين (بستر دستگاه)
- پايه هاي تعادلي
- پايه هاي محرك
- تجهيزات اندازه گيري
به طور معمول، بستر و شاسي ماشين از چدن ساخته ميشود. يك شيار T شكل براي محكم كردن روتور وجود دارد. پايههاي تعادلي كه از چدن ساخته ميشوند، ميتوانند به راحتي در طول دستگاه با توجه به طول روتور، جابهجا شوند. سنسورهاي پيزوالكتريك، نيروي عدم تعادل گريز از مركز را حس كرده و سيگنالي معادل با آن نيرو، به صورت خروجي به پانل اندازهگيري ميفرستند. يك پيش تقويت كننده (Preamplifier) اين سيگنال هاي الكتريكي را براي تحليل دستگاه هاي اندازه گيري، آماده ميسازد.

روش محاسبه زاويه عدم تعادل در بالانس استاتیکی و دینامیکی
سه روش براي يافتن زاويه عدم تعادل وجود دارد:
-
مولد فاز مرجع
در ماشين هاي رانش از انتها، يك مولد فاز مرجع به طور مستقيم با محور ماشين كوپل ميشود. مولد يك سيگنال مرجع الكتريكي هم فركانس با سرعت قطعه چرخشي توليد ميكند. اختلاف فاز بين سيگنال مرجع و سيگنال عدم تعادل توليد شده به وسيله ترانسديوسر، توسط تجهيزات اندازهگيري كه نشاندهنده مكان زاويهاي عدم تعادل ميباشد، تفسير و مشخص ميشود. اين ماشينها داراي يك ديسك مدرج ميباشند كه به محور ماشين كوپل شده و نقطه مرجع مناسبي را براي جابهجايي مكان زاويهاي روي روتور فراهم ميسازند.
-
روش استروبوسكوپ (حركت نمايي)
اين روش در ماشين هايي كه با تسمه نقاله به حركت در ميآيند مورد استفاده قرار ميگيرد. مدار اندازهگيري الكترونيكي براي روشن شدن چراغ حركت نمايي (استروسكوپ) در هر دور چرخش يك پالس را به وجود ميآورد. اين فلشها و پالسها در جهت مسقيم نوارهايي ثابت كه در پيرامون روتور قرار دارند ميباشند.
تعداد پالس هاي مربوط به مكان زاويهاي عدم تعادل، طوري به نظر ميرسد كه نوساني وجود ندارد و يكنواخت ميباشد. با وجود اينكه ذخيره اطلاعات مكان زاويهاي ممكن نميباشد، اين روش به صورت نشانه مسقيم بر روتور مورد استفاده قرار ميگيرد.
-
روش اسكن تصاوير
اين روش نيز در سيستم هايي كه با تسمه نقاله به حركت در ميآيند مورد استفاده قرار ميگيرد. يك منبع روشنايي از قسمت اسكن كننده، بر روي نشانه هاي مرجع اسكن كه در پيرامون روتور قرار دارند، متمركز ميشود. يك فتوسل در هر دور چرخش انقطاع ها را احساس كرده و يك سيگنال مرجع هم فركانس با سرعت روتور توليد ميكند. اختلاف فاز بين سيگنال مرجع و سيگنال عدم تعادل توليد شده به وسيله ترانسديوسر، به وسيله تجهيزات اندازهگيري تعيين شده كه اين اختلاف فاز، مكان زاويهاي عدم تعادل را نشان ميدهد. سپس اين زاويه به وسيله يك زاويه سنج با مرجع به روي روتور، جهت اسكن نشانه هاي مرجع روي روتور، انتقال مييابد.
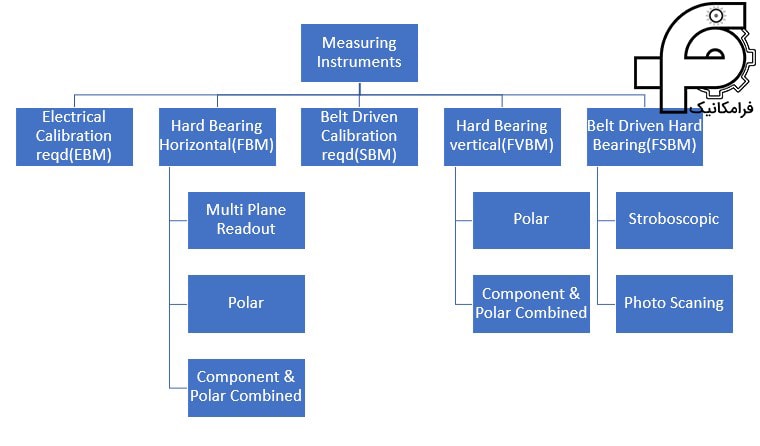
انواع سيستمهاي پردازش برای بالانس استاتیکی و دینامیکی
در يك تقسيم بندي كلي انواع سيستم هاي پردازش و سيستم مناسب جهت استفاده از آنها را مشاهده ميكنيد:
-

شكل 5- نمودار طبقه بندي تجهيزات پردازش نشان قطبي (Polar indication)
اين نشانه براي ماشين هايي با اهداف عمومي مناسب ميباشد، كه اصلاحات بر روي روتور بايد در هر مكان زاويهاي بر محيط صفحه انتخاب شده از روتور انجام شود. روتورهاي مورد استفاده در نشانهاي قطبي، آرماتورهاي موتورهاي الكتريكي، پروانه ها و چرخ-لنگرها ميباشند.
-
نشان اجزاء (Component indication)
اين سيستم براي روتورهايي كه محل اصلاح عدم تعادل آن از پيش تعيين شده است و يا چند بخش معين بر روي محيط وجود دارد، مناسب ميباشد. بنابراين عدم تعادل بايد در اجزاء، در راستاي سيستم مختصات مناسب اصلاح شود. تيغههاي فن در اين روش مورد تست قرار ميگيرند.
-
پردازش چند خط سيري (Multilane Readout)
اين سيستم براي ماشين هايي كه در آنها، عدم تعادل به بيشتر از دو صفحه تصحيح بر روي روتور و مكان هايي از پيش تعيين شده جهت تصحيح عدم تعادل نياز دارد مورد استفاده قرار ميگيرند.
-
EBM
در اين نوع از تجهيزات، تنها يك نشانگر ميزان عدم تعادل آنالوگ دارد. اين نشانگر، ميزان عدم تعادل را در صفحه انتخاب شده در تنظيم مولد مرجع براي ميزان بالاترين خروجي در نشانگر برحسب متر نشان ميدهد. زاويه عدم تعادل به وسيله نشانگر زاويه عدم تعادل روي ژنراتور مرجع كه همزمان با يك نشانه مرجع ثابت بر روي بدنه ماشين است، نشان داده ميشود. كاليبراسيون اين نوع از تجهيزات براي روتور داده شده نيازمند بالانس به وسيله سعي و خطاي اوليه ميباشد. هيچ وسيلهاي براي ذخيره ميزان عدم تعادل در تجهيزات استاندارد نميباشد. زاويه عدم تعادل به كمك ديسك مرجع زاويه عدم تعادل كه بر روي محور ماشين به روتور قرار دارد، انتقال مييابد.
-
FBM
زاويه و مقدار عدم تعادل به وسيله دو نشان دهنده آنالوگ كه بر روي هر صفحه قرار دارند، نشان داده ميشوند. ماشين براي نشان دادن ميزان عدم تعادل به گرم، به وسيله انتخاب برنامه مناسب و ابعاد هندسي و كمك 5 عقربه و سوئيچ برنامه، اين كار را انجام ميدهد. هيچ كاركرد آزمايشي مورد نياز نميباشد. يك دستگاه ضبط مقدار نشان داده شده، براي ثبت ميزان نشان داده شده تا كاركرد بعدي وجود دارد. زاويه عدم تعادل به كمك ديسك مرجع زاويه عدم تعادل كه بر روي محور ماشين به روتور قرار دارد، انتقال مييابد.
-

اشكال مختلف روتور SBM
اين سيستم شامل يك نشانگر آنالوگ ميزان عدم تعادل ميباشد. اين سيستم بايد به صورت ابتدايي به وسيله يك صفحه مدرج، با سرعت چرخش روتور تنظيم شود. پس تمامي فرآيندهاي كاليبراسيون سيستم EBM بايد انجام شود. زاويه عدم تعادل به وسيله مكاني نشان داده ميشود كه استروبوتيوب بر روي تعداد نوارهايي كه به روتور براي صفحه تصحيح متصل شده است، فلش ميزند.
هيچ وسيلهاي جهت ضبط و ثبت بر روي تجهيزات استاندارد وجود ندارد.
-
FSBM
اين سيستم كاملا مشابه FBM ميباشد. زاويه عدم تعادل به صفحات تصحيح مربوطه با مرجع نسبت به نشانگر زاويه عدم تعادل بر روي روتور كه سنسورها اسكن ميكنند، منتقل ميشود. اين تجهيزات با يك نشانگر دور موتور ديجيتال جهت نشان دادن سرعت عملكرد تجهيز ميشوند. جهت كاربري هاي خاص، يك ميكرو تحليلگر نيز ميتواند مورد استفاده قرار گيرد.
يك اندازه گيري ايمن و مطمئن بايد شامل شرايط زير باشد:
- محافظت در برابر بار زياد موتور گرداننده
- فيوزها براي تجهيزات اندازهگيري
- ليميت سوئيچ براي كوپلينگ هاي يونيورسال براي مدلهاي با ظرفيت بيش از 100 كيلوگرم
- بستن گيره هاي ياتاقان گردهاي روتور براي تمامي مدلها به جز تا 10‐SBM/FSBM
- كلاچ هاي لغزشي براي انتقال گشتاور آرام براي مدلهاي با ظرفيت بالاي 1000 كيلوگرم و ماشين هاي عمودي با ظرفيت بالاي 10 كيلوگرم
ويژگي ها و تجهيزات اضافي
ماشينهاي استاندارد همانطور كه در صفحه داده هاي فني شرح داده شده است، توسط سيستم هاي اندازه گيري استاندارد تجهيز ميشوند. در كنار اين تجهيزات، ويژگيها و تجهيزات اضافي، جهت كاربردهاي ويژه اي ميتوانند مورد مصرف قرار بگيرند.



مطالب زیر را حتما مطالعه کنید

دوره های آموزشی مرتبط
دیدگاهتان را بنویسید